
Összetétel
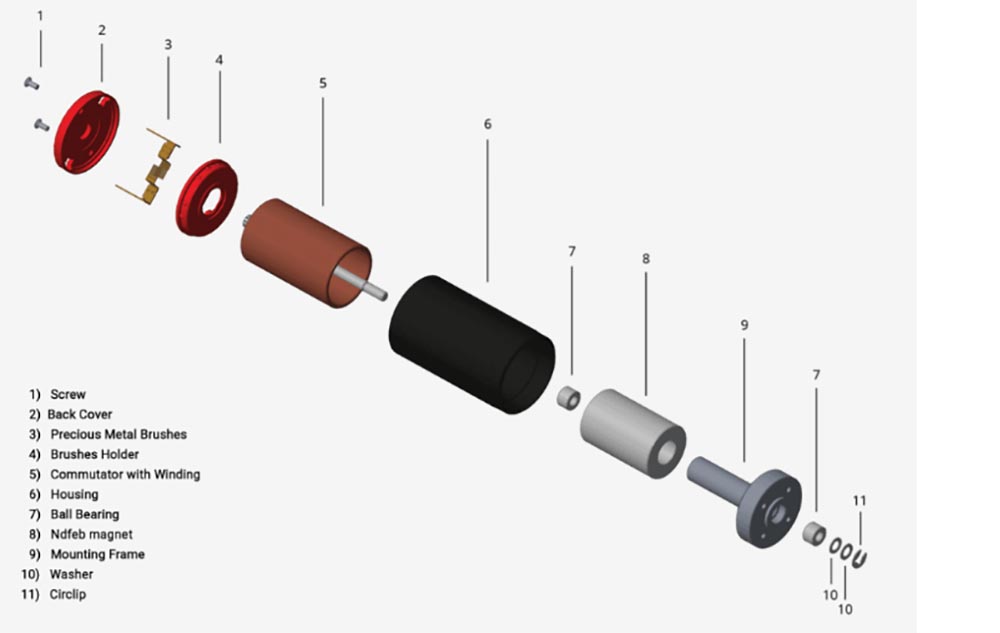
1. Állandó mágneses egyenáramú motor:
Állórész pólusokból, rotorokból, kefékből, házakból stb. áll.
Az állórész pólusai állandó mágnesekből (állandó mágneses acél), ferritből, alnico-ból, neodímium-vas-bórból és más anyagokból készülnek. Szerkezeti formájuk szerint többféle típusra oszthatók, például hengeres és csempe típusra.
A rotor általában laminált szilícium acéllemezekből készül, és a zománcozott huzal a rotormag két rése között van feltekercselve (három tekercs van három résben), és az illesztéseket a kommutátor fémlemezeire hegesztik.
A kefe egy vezetőképes alkatrész, amely összeköti a tápegységet és a rotor tekercselését, és két tulajdonsággal rendelkezik: vezetőképességgel és kopásállósággal. Az állandó mágneses motorok keféi egynemű fémlemezeket vagy fémgrafit keféket, valamint elektrokémiai grafit keféket használnak.
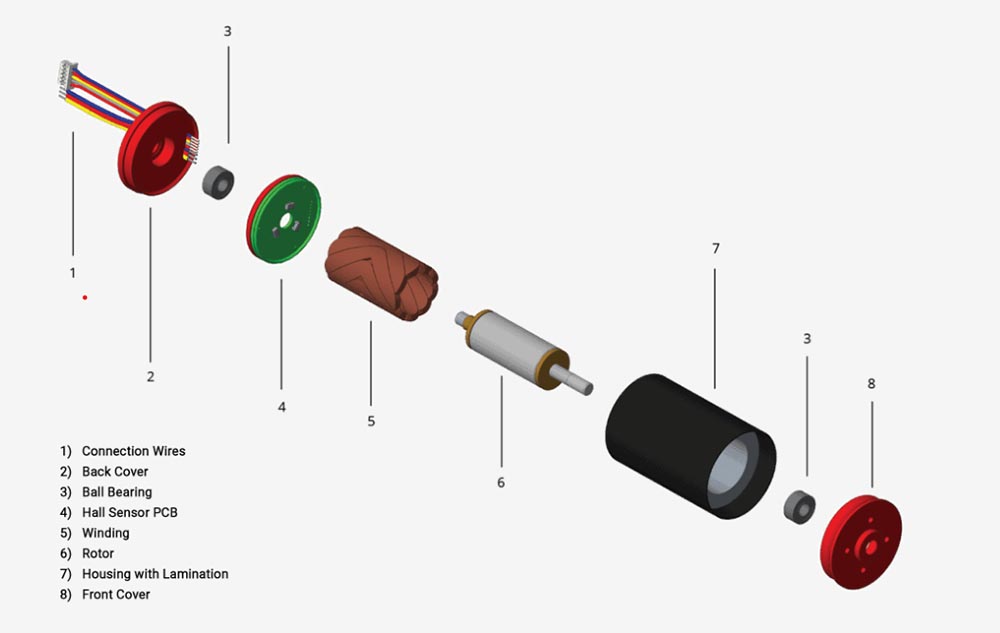
2. Kefe nélküli egyenáramú motor:
Állandó mágneses rotorból, többpólusú tekercselő állórészből, helyzetérzékelőből és így tovább áll. A kefe nélküli egyenáramú motor jellemzője, hogy kefe nélküli, és félvezető kapcsolóeszközöket (például Hall-elemeket) használ az elektronikus kommutáció megvalósításához, azaz az elektronikus kapcsolóeszközöket a hagyományos kontakt kommutátorok és kefék helyettesítésére használják. Előnyei a nagy megbízhatóság, a kommutációs szikra hiánya és az alacsony mechanikai zaj.
A helyzetérzékelő a rotor helyzetének változásával egy bizonyos sorrendben kommutálja az állórész tekercsének áramát (azaz érzékeli a rotor mágneses pólusának az állórész tekercseléshez viszonyított helyzetét, és a meghatározott pozícióban helyzetérzékelő jelet generál, amelyet a jelátalakító áramkör feldolgoz, majd eltávolít. Vezérli a teljesítménykapcsoló áramkört, és egy bizonyos logikai kapcsolat szerint kapcsolja a tekercsáramot).

2. Kefe nélküli egyenáramú motor:
Állandó mágneses rotorból, többpólusú tekercselő állórészből, helyzetérzékelőből és így tovább áll. A kefe nélküli egyenáramú motor jellemzője, hogy kefe nélküli, és félvezető kapcsolóeszközöket (például Hall-elemeket) használ az elektronikus kommutáció megvalósításához, azaz az elektronikus kapcsolóeszközöket a hagyományos kontakt kommutátorok és kefék helyettesítésére használják. Előnyei a nagy megbízhatóság, a kommutációs szikra hiánya és az alacsony mechanikai zaj.
A helyzetérzékelő a rotor helyzetének változásával egy bizonyos sorrendben kommutálja az állórész tekercsének áramát (azaz érzékeli a rotor mágneses pólusának az állórész tekercseléshez viszonyított helyzetét, és a meghatározott pozícióban helyzetérzékelő jelet generál, amelyet a jelátalakító áramkör feldolgoz, majd eltávolít. Vezérli a teljesítménykapcsoló áramkört, és egy bizonyos logikai kapcsolat szerint kapcsolja a tekercsáramot).
3. Nagy sebességű, állandó mágneses, kefe nélküli motor:
Állórészből, mágneses acél rotorból, napkerékből, lassító tengelykapcsolóból, agyházból és így tovább áll. A Hall-érzékelő a motor burkolatára szerelhető a sebességméréshez.
Kefés és kefe nélküli motorok összehasonlítása
A szénkefés és a szénkefe nélküli motor villamosítási elve közötti különbség: A szénkefés motort mechanikusan kommutálja egy szénkefe és egy kommutátor. A szénkefe nélküli motort elektronikusan kommutálja egy vezérlő egy indukciós jel alapján.
A kefés motor és a kefe nélküli motor tápellátási elve eltérő, és a belső szerkezetük is eltérő. A kerékagymotorok esetében a motor nyomatékának kimeneti módja (függetlenül attól, hogy a sebességváltó mechanizmus lassítja-e) eltérő, és a mechanikai szerkezetük is eltérő.
mag nélküli kefés egyenáramú motor
mag nélküli kefe nélküli egyenáramú motor
Közzététel ideje: 2019. június 3.